

Flying Carpet, by Viktor M. Vasnetsov, 1880. By 130 BC, a magic carpet supposedly flew King Phraates II of Parthia to battle. Flying carpets have graced folktales from Russia to Iraq. They combine two once-fantastic dreams: autonomous vehicles, and flight. Credit: Wikimedia Commons
When Robert Whitehead invented the self-propelled torpedo in the 1860s, the early guidance system for maintaining depth was so new and essential he called it “The Secret.” Airplanes got autopilots just a decade after the Wright brothers. These days, your breakfast cereal was probably gathered by a driverless harvester. Sailboats have auto-tillers. Semi-autonomous military drones kill from the air, and robot vacuum cleaners confuse our pets.
Yet one deceptively modest dream has rarely ventured beyond the pages of science fiction since our grandparent’s youth: the self-driving family car. Unlike Mars rovers or sailboats, cars need to navigate the complex world of city streets, passing inches away from fragile, litigious human beings. This article explores both the history of autonomous vehicles in general, and that elusive goal of a car that drives itself. Several groups say they are now close to making it a reality. If they succeed, how will they change our world? Could autonomous cars replace public transportation? Would they make our cities more walkable, or supersize them with unimaginable sprawl?
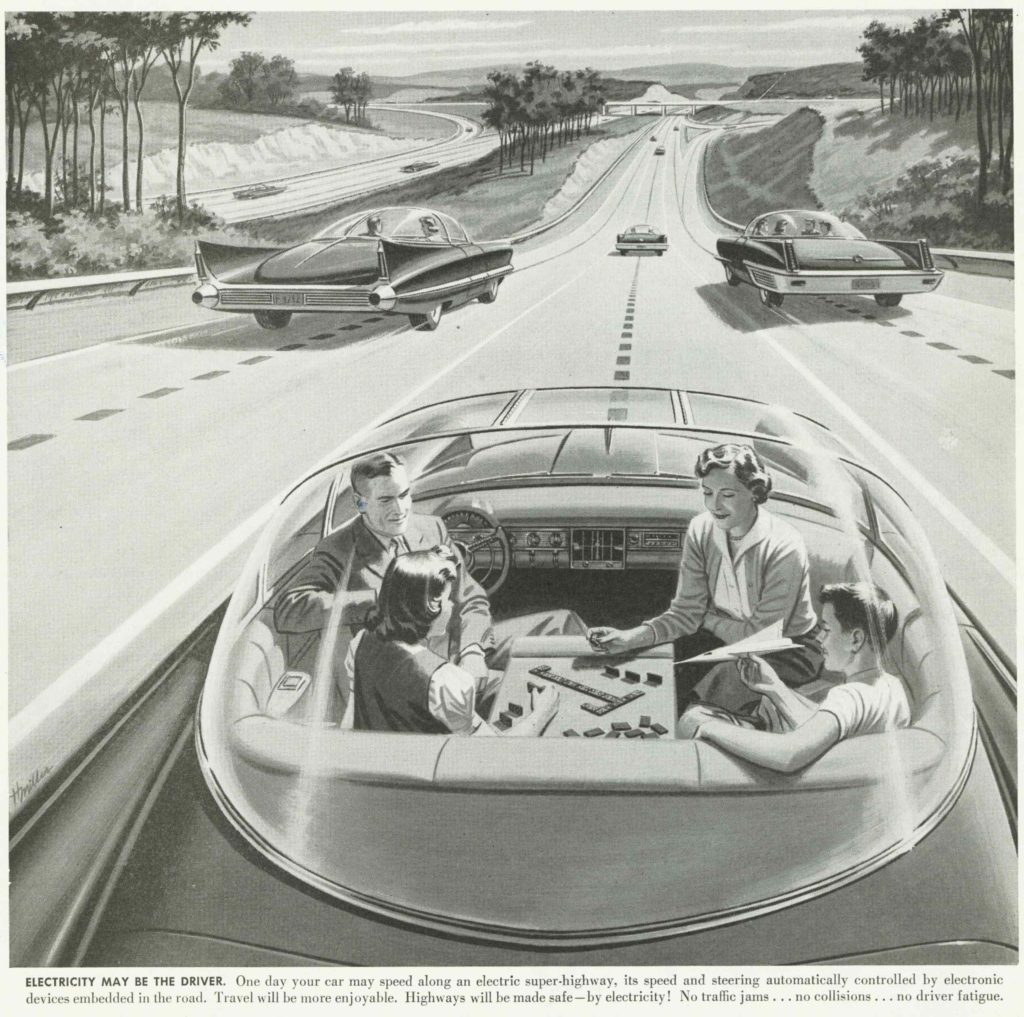
Driverless Car of the Future, advertisement for “America’s Electric Light and Power Companies,” Saturday Evening Post, 1950s. Credit: The Everett Collection.
“The world we are now seeing is a vision, an artistic conception, which may undergo many changes as it develops into the great realities of tomorrow.” - New York World’s Fair, “Futurama: Highways & Horizons,” 1939. Credit: General Motors
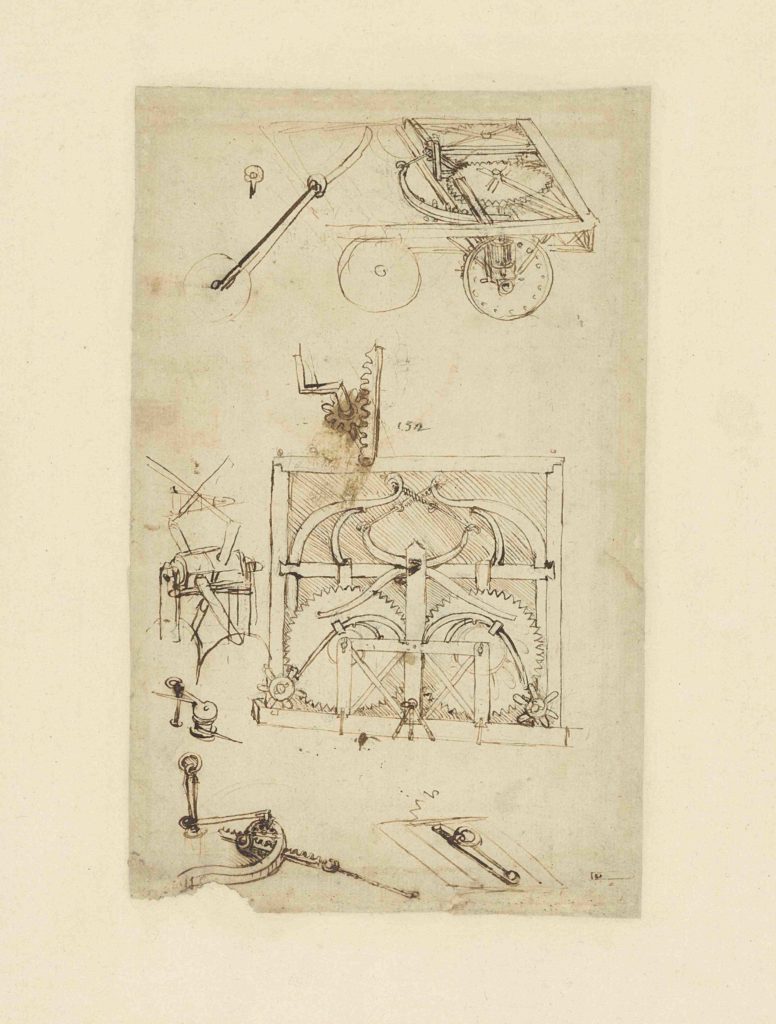
Sketch of a pre-programmed clockwork cart by Leonardo Da Vinci, circa 1478 Had it been built, this cart would have been powered by large coiled clockwork springs, propelling it over 130 feet. The clever control mechanism could have taken the vehicle through a predetermined course. Credit: Biblioteca Ambrosiana, Milan, Italy / De Agostini Picture Library / Metis e Mida Informatica / Veneranda Biblioteca Ambrosiana / The Bridgeman Art Library
Draft animals and distracted pedestrians can usually keep to a path on their own. But with the first self-propelled vehicles came the need to have an alert human guide the craft at every moment, or risk disaster. The modern experience of driving was born – that peculiar mix of anxiety, alertness, and boredom.
Sailboats were likely the first self-propelled vehicles, and possibly the first to have some form of automated steering, the auto-tiller. This device uses ropes to connect something like a weathervane to the boat’s tiller, so that the craft stays on course even with shifting winds.
The first widely used motorized vehicles were steamboats and trains. The latter adopted their guiding tracks more to support their huge weight than for directional control, but tracks serve both ends. Just a decade or so after its invention, the airplane got its first autopilot.
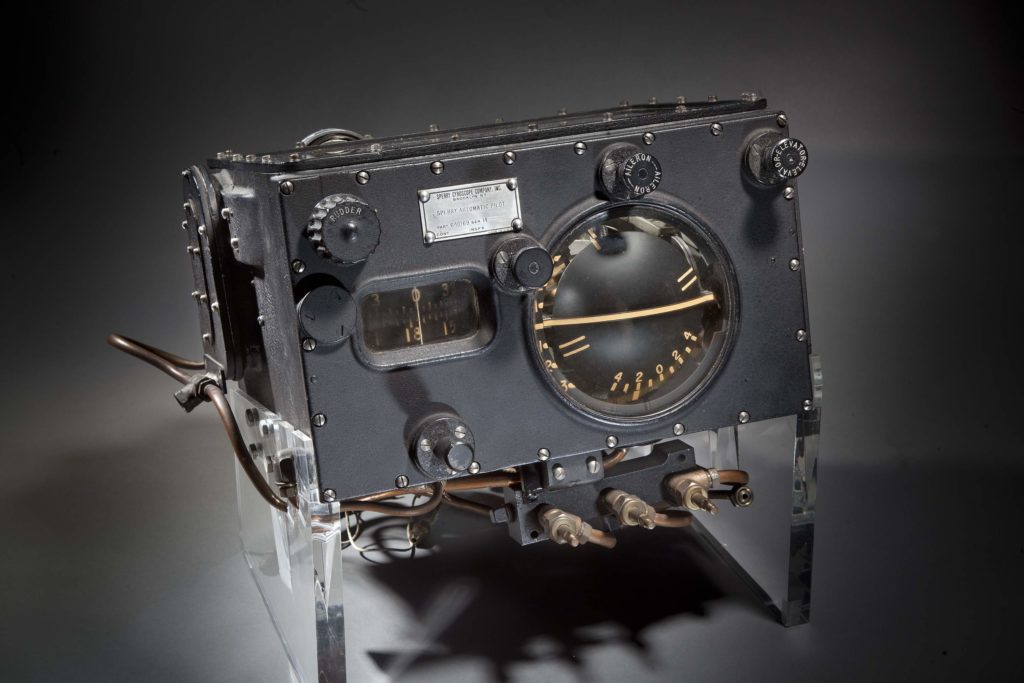
“Mechanical Mike” Autopilot, 1930s In 1933, Wiley Post became the first person to fly solo around the world. It might not have been possible without this Sperry Gyroscope autopilot, which allowed him to simultaneously fly and navigate. Credit: Photo by Eric Long, National Air and Space Museum, Smithsonian Institution (NASM 2012-01350)
The kind of self-guiding that carried torpedoes to their targets was repurposed for another medium – the air. By the early 1940s the German V-1 drone bomb was buzzing its way to London on stubby wings. Its successor, the V-2 rocket, touched the edge of space itself.
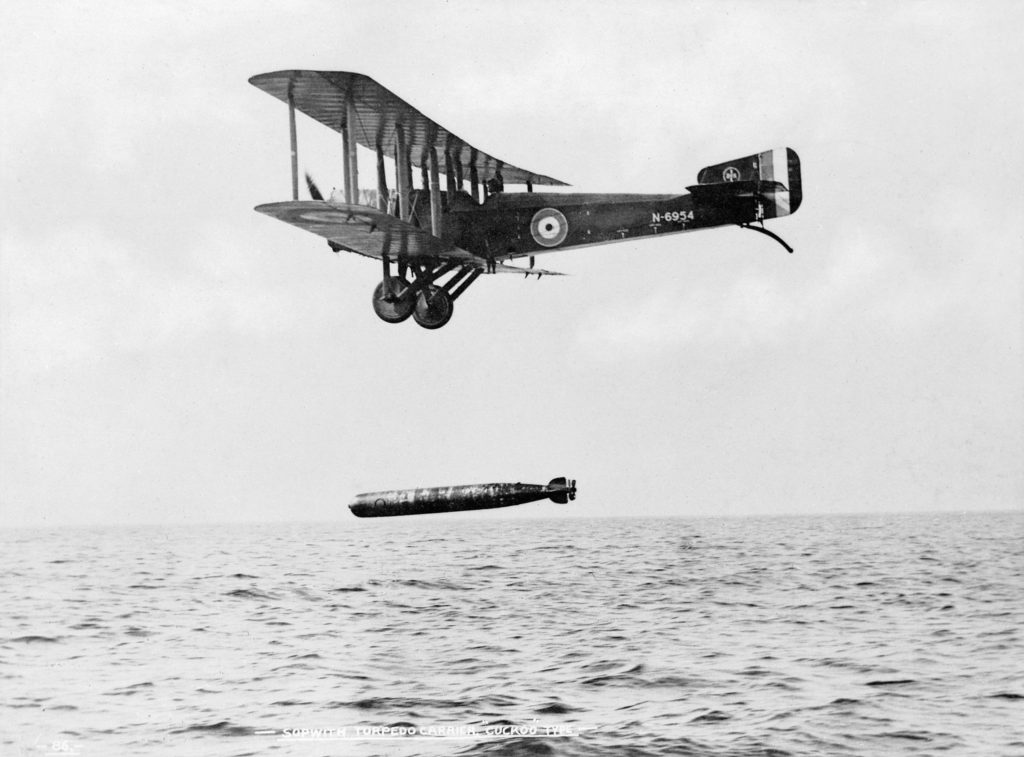
Sopwith Cuckoo bomber (piloted) launching a torpedo, circa 1918. Developed in the 1860s by Robert Whitehead, self-propelled torpedoes initially had only simple guidance systems for keeping a constant course and depth. By WWII they could home in on targets using sonar. Credit: © IWM (Q 69295)
German Vergeltungswaffe (“Vengeance Weapon”) 2 rocket, aka V2, circa 1945. A pioneering ballistic missile, the V2 was the first human artifact in outer space. Gyroscopes kept it on course from Nazi-occupied France to London and Antwerp. Inventor Werner von Braun later developed the Apollo moon rockets. Credit: © IWM (BU 11149)
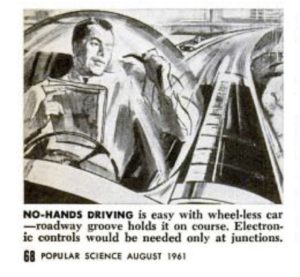
Illustration for Popular Mechanics article on automated highways, 1961. Credit: Popular Mechanics
Driverless cars and taxis have been improving the lives of millions in the pages of science fiction since 1935. Joined by GM’s automated highway plans in its seminal 1939 Futurama ride, the basic driverless dream has changed little in the ensuing decades. Besides reducing accidents and congestion, such cars might liberate city centers by eliminating the need for most parking.
Of course, in the pre-computer days of the 1930s, giving cars meaningful smarts was literally the stuff of science fiction. But there might be other ways….
Much of the danger of early motoring was not the cars but the era’s narrow, ill-marked roads, designed mostly for local travel. Railroads were still the superhighways. By the 1920s, a few began to dream of transforming roads into something more like a modern freeway system, where controlled access would simultaneously raise speeds and reduce accidents.
Italy’s Autostrada and Germany’s famous Autobahn plans stopped there. But American designer and futurist Norman Bel Geddes mated the Autobahn vision with the sorts of electronic speed and collision control systems common to railroads. His spectacular Futurama ride for General Motors at the 1939 World’s Fair also imagined trench-like lanes that would keep cars apart in their own “tracks.” The idea was to drive to the freeway normally, then engage the automatic systems and kick back until your exit. Related visions involved magnetic trails built into the road’s surface, or physical slots or troughs, or train-like rails engaging hidden steel wheels on the inside of each tire.

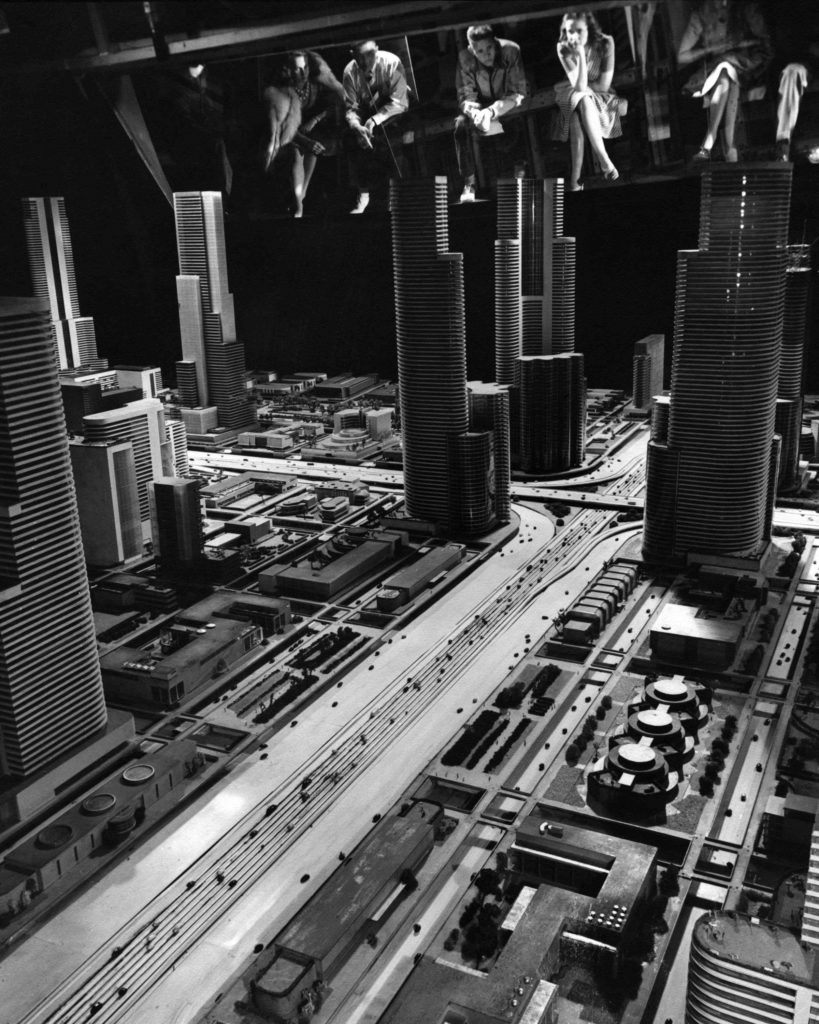
General Motors Futurama exhibit, “Highways & Horizons” pavilion, New York World’s Fair, 1939. Visitors rode for a third of a mile in audio-equipped chairs through the 35,738 square foot scale model of an imagined world of 1960, complete with automated highways. Sections included cities, countryside, and industrial areas. Credit: General Motors
80 years on the two basic ideas – smart cars, and/or smart roads – have changed little. Prime goals remain safety, speed, access, more cars sharing the road, intelligent intersections, and reducing congestion.
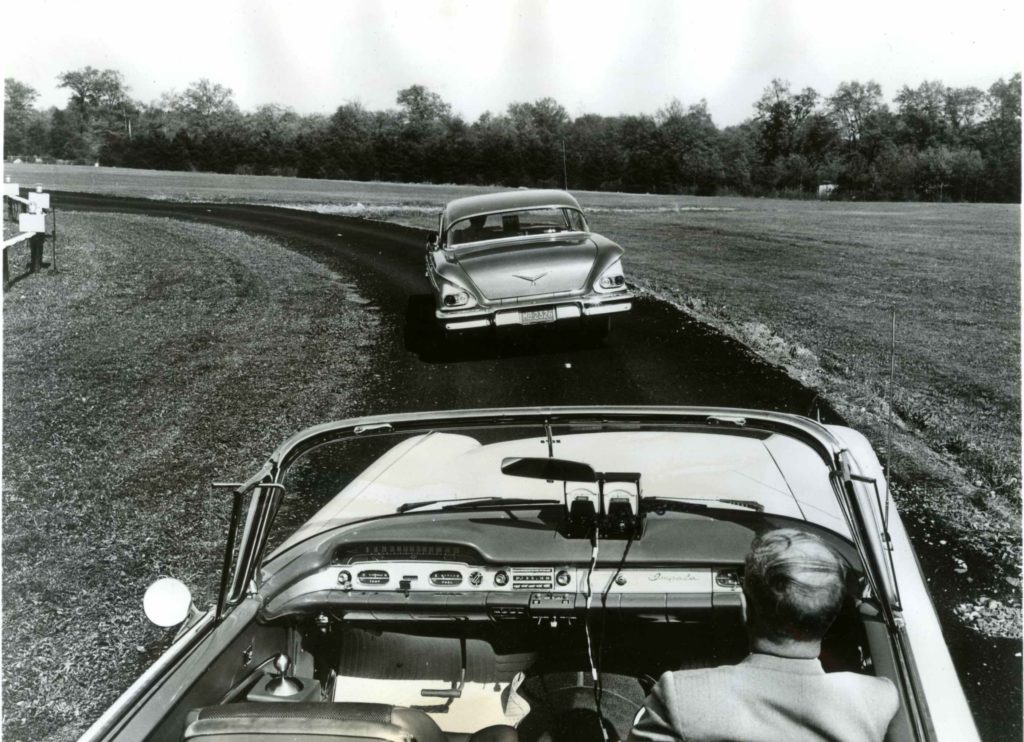
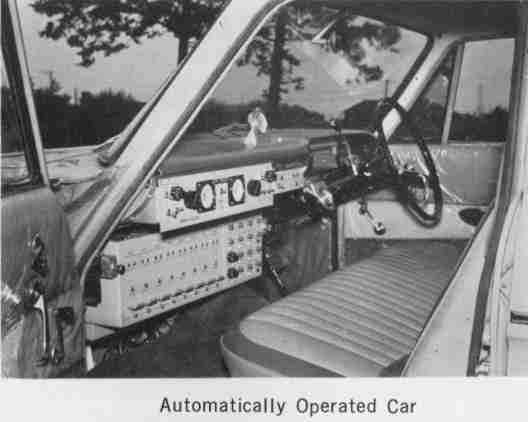
Autonomous Highway System tests, 1950s GM and RCA developed automated highway prototypes with radio control for speed and steering. Magnets in the car tracked a steel cable embedded in the road; control towers managed overall traffic flow. Credit: Radio Corporation of America (RCA)
If you’ve ever seen a cockroach, you know that even insect nervous systems are capable of navigating through a complex environment at tremendous relative speed. A car-sized cockroach would be running – and turning, and dodging – at over 200 mph. Giving cars just a fraction of those navigating capabilities has taken 50 years.
It’s no accident that autonomy came to other vehicles first. However distant or exotic, the sea, the air, and even the surface of Mars are relatively forgiving environments for self-guiding vehicles. There are no children to dart out in their path; no traffic lights, or distracting billboards. Mostly, there’s just a lot less delicate stuff rushing by in close proximity – other vehicles, pedestrians, outdoor restaurants, flimsy wooden buildings.
Because making cars smart is so hard, early self-driving plans focused on special freeways for guiding suitably equipped cars safely along them, more railroads than robots. The technology was projected in the 1939 Futurama and showcased by the 1950s. But getting the massive consensus needed to build public infrastructure never happened.
Soviet Mars Prop-M Rover, circa 1971. Both the Mars 2 and Mars 3 missions carried landers with sled-like Prop-M autonomous rovers, which were meant to roam short distances around the lander on an umbilical cord. Unfortunately, both landers failed. Credit: NASA Soviet Mars Prop-M Rover, circa 1971. Both the Mars 2 and Mars 3 missions carried landers with sled-like Prop-M autonomous rovers, which were meant to roam short distances around the lander on an umbilical cord. Unfortunately, both landers failed. Credit: NASA
The digital computer promised to make vehicles smart in ways rarely imagined outside of fiction. One of the first uses was guidance computers for nuclear missiles. Bulging cold-war budgets let designer build these with still bleeding-edge semiconductors instead of fragile vacuum tubes.

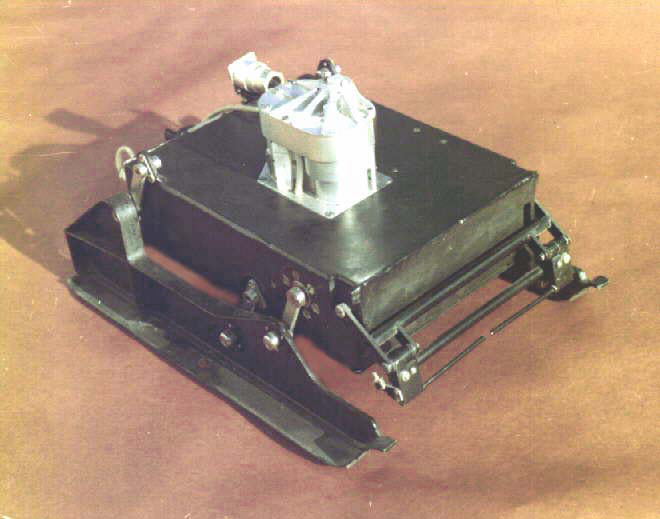
Polaris Missile Guidance System Mark 2, exterior case, Raytheon, 1962. Nuclear-equipped ballistic missiles were some of the first autonomous vehicles to be guided by digital computers. This early example for the submarine-launched Polaris missile was designed by the MIT Instrumentation Laboratory, which later developed the Apollo guidance computers that landed on the moon. Gift of Charles Stark Draper Laboratory, X89.82
By the late 1960s experimental robots were navigating through novel environments at SRI and Stanford, [testing out still-new AI techniques]. By 1971 semi-autonomous space probes were landing on other worlds. Had a parachute not failed to deploy, the Soviet Mars 2 rover might have been crawling the surface of Mars on its own that year. Today, autonomous underwater vehicles can roam the seas for years at a time. The Voyager space probe, launched in 1977, recently became the first human object to travel beyond our solar system.
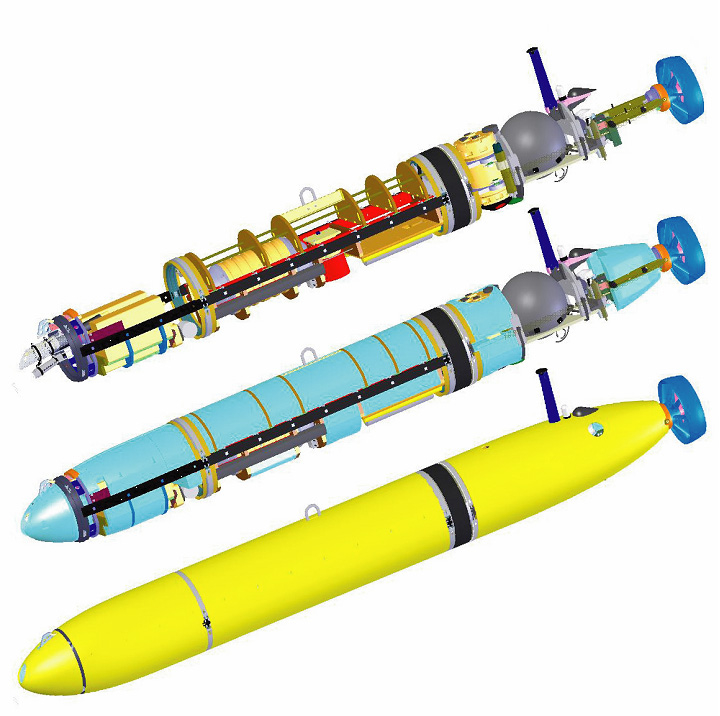
Monterey Bay Aquarium Research Institute (MBARI) Autonomous Underwater Vehicle (AUV) AUV’s like this one can roam the depths of the ocean on their own, using powerful sonars to map the ocean floor and even the geology below. Similar models were used to search for missing Malaysia Airlines Flight 370 at a depth of 20,000 feet. Credit: MBARI

General Atomics MQ-1 Predator unmanned drone. The U.S. Air Force and CIA’s infamous Predator has been used for surveillance since 1995, and for remote killing since 2001. The Predator is semi-autonomous, but its Hellfire missiles are fired only by a human operator. Credit: U.S. Air Force photo/Lt Col Leslie Prat
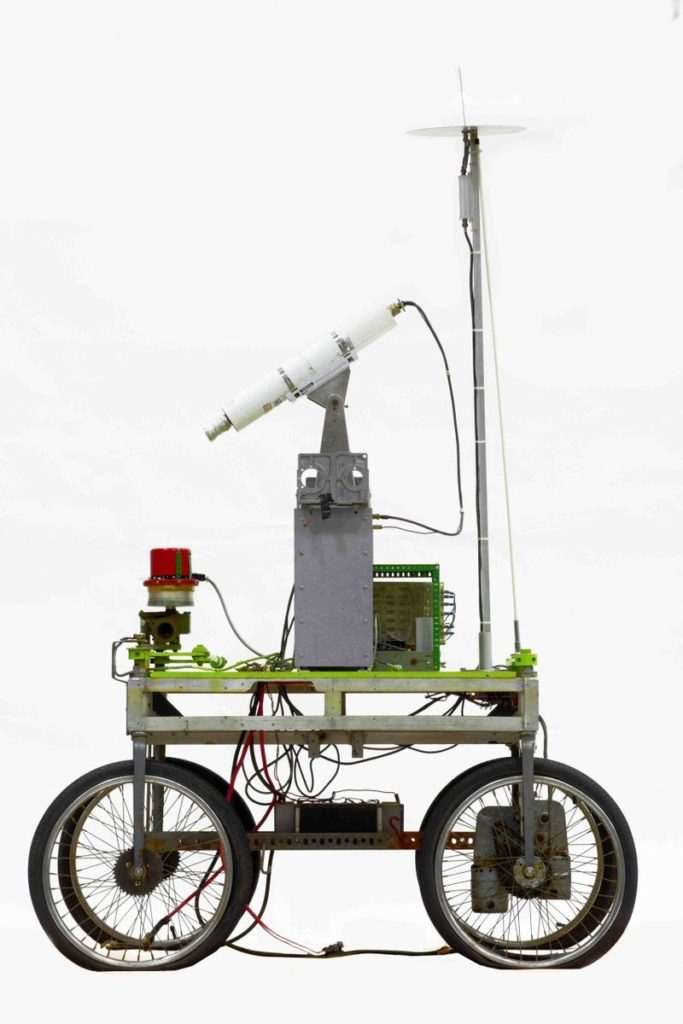
Stanford Artificial Intelligence Laboratory Cart, 1964-71. Along with Shakey the robot at neighboring SRI, the Stanford Cart pioneered techniques for navigating through an unfamiliar environment with artificial intelligence and machine vision. The cart famously wandered into a nearby road, but survived unscathed. Credit: © Mark Richards
By the 1960s, enthusiasts of artificial intelligence (AI) on computers began dreaming of cars smart enough to navigate ordinary streets on their own. The challenges were daunting – essentially to reverse-engineer the relevant systems in a moving animal like a cockroach:
1) Sensing 2) Processing (modeling the outside world, making decisions) 3) Reacting, with appropriate movement The first and last steps were feasible with known technology. The unknown part was the processing, the machine intelligence needed in between.
Much of that challenge was about interpretation. A car whose ”mental” model mistakes a pedestrian for her reflection in a puddle can be a dangerous thing indeed.
Early AI pioneers dreamed of breakthroughs that would bring human-like robots by the millennium. But real progress was more incremental than revolutionary. In the 1980s, German pioneer Ernst Dickmanns got a Mercedes van to drive hundreds of highway miles autonomously, a tremendous feat especially with the computing power of the time. Around the world, dozens of other pioneers added their own improvements.

Ernst Dickmanns’ VaMoRs Mercedes van, Bundeswehr University Munich, 1986-2003. Dickmanns’ laboratory substantially pioneered practical self-driving technology; this van tested three generations of systems. Dickmanns’ 1993 VaMP Mercedes sedan would cover thousands of miles in traffic at up to 110 mph as part of the massive Eureka PROMETHEUS project. Credit: © Ernst D. Dickmanns. All rights reserved. For more information: www.dyna-vision.de
Tsukuba Mechanical Engineering Lab, Japan, 1977 . This pioneering computerized driverless car achieved speeds of up to 20 miles per hour, by tracking white street markers with machine vision.

ARGO Project, Universities of Parma and Pavia An offshoot of the European PROMETHEUS project, the ARGO team drove their Lancia Thema testbed car 1200 miles around Italy in 1996, 94% of the time in autonomous mode.

DARPA Grand Challenge winner Stanley (L), runner-ups Sandstorm® and H1ghlander (middle). The winning Stanley VW Touareg team was headed by Stanford Artificial Intelligence Laboratory professor Sebastian Thrun. Carnegie-Mellon’s Sandstorm and sister Humvee H1ghlander lagged just behind. All used similar technology, refined from the less successful 2004 event. Credit: Courtesy of Carnegie Mellon University
In 2004, the U.S. Defense Advanced Research Projects Administration (DARPA) challenged dozens of teams then working on autonomous vehicles to compete for a $1 million prize. The hope was that a third of military vehicles would drive themselves by 2015.

Sebastian Thrun, team leader for Stanley, winner of the 2005 Grand Challenge. Thrun lost a friend to an auto accident in his youth, which motivated him to research self-driving. When he led the Stanley team he was Director of the Stanford AI Lab. He later co-founded Google’s self-driving effort and Google [x]
The first year’s crop of entrants failed miserably, traveling barely a few miles before crashing. But the next year an odd flotilla of driverless cars and trucks were crossing huge swathes of California’s Mojave desert with nary a scratch. By 2007 the Urban Challenge had extended those successes to a mock city environment. While European researchers had laid the groundwork in self-driving, the U.S. was now a serious contender. Several factors made the difference: Better software for road-following and collision avoidance, and improved radar and laser sensors. Good mapping also helped. While machines lag behind animals in interpreting their environments, a car that always “knows” what’s around it can focus its interpretive skills on variables that change.

The Navia may be the first commercially available self-driving car. Designed to shuttle passengers around a closed campus, its low 12mph top speed lets it make a full stop for unexpected obstacles. Credit: Induct Technology
You can buy a self-driving car today. It’s called the Navia, and there are some limits. It’s only designed for closed environments, like a resort, and its top speed is 12 miles an hour, or about the same as gasoline powered cars in 1895. If you’re not ready to buy your own robocar – the Navia costs $250,000 – you can still ride in another example at London’s Heathrow airport.
Like many emerging technologies, self-driving has found uses in specialized applications long before reaching the general public. In the pit mines of northern Australia, trucks the size of a spacious house rumble over gravel roads without a human touch. Combine harvesters and other farm vehicles are increasingly outfitted with self-driving capabilities, as are specialized vehicles in warehouses, factories, and other industrial environments.
Don’t forget that more and more self-driving features also come as options on high end conventional cars, like the BMWs and Volvos that keep lanes, self-park, and brake for emergencies. While their manufacturers are eager to point out that such cars augment your skillful driving, rather than replace it, some systems are getting so powerful that distinctions blur.
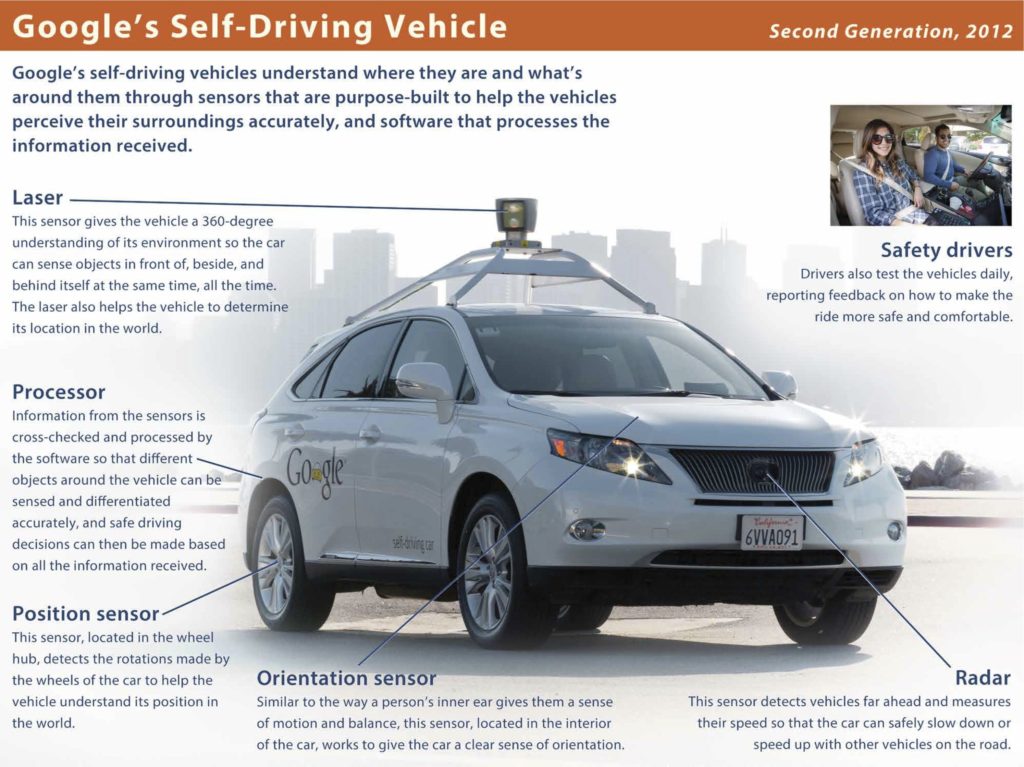
Google, of course, is famously working on self-driving systems for the open road, with full autonomy as an explicit goal. But from Toyota to Nissan, several other companies are quietly chasing very similar dreams. Three states now permit self-guided vehicles. Will the autonomous future arrive not with a bang, but so gradually we barely notice?

Ultra, London Heathrow Airport robo-taxi. Some futurists feel that self-driving taxi “pods” could one day replace much public transit. Today, you can take a limited version from Heathrow’s Terminal Five to the parking lot or public transit stations. Credit: Ultra Global PRT

Nissan self-driving car The first such car to be permitted on Japanese roads, Nissan’s Autonomous Drive test car has been taking dignitaries for a ride – including Prime Minister Shinzo Abe. It is based on an electric Nissan Leaf. Credit: © 2014 Nissan

Dual-mode autonomous or piloted forklift, Siemens Off public roads, driverless vehicles harvest the wheat for your breakfast cereal, move goods in factories, and much more. Autonomous trucks as big as houses even carry loads of ore up from open pit mines. Credit: Wikimedia Commons

Velodyne laser range-finding system (LiDAR) . LiDAR creates a 3D map of a car’s environment using harmless laser beams. Loudspeaker manufacturer Velodyne built the system used by most winners of the DARPA Urban Challenge, and by Google and others today

Nevada self-driving vehicle license plate, 2012. In 2012 Nevada issued this special license plate to Google for the very first registered self-driving car, marked with the infinity symbol. Credit: Photo by Wayne Wakefield, National Museum of American History, Smithsonian Institution
The computer systems that make self-driving cars work have gotten smaller over the years, and morphed from huge installations to discreet units mounted in trunks. They all handle roughly the same functions: taking in raw data from sensors, matching it with known models, and executing the appropriate movements by sending signals to the car’s steering, throttle, brakes, turn signals, and other controls.

Computer in Stanley car (DARPA), 2005 The computers and electronics that powered Stanley completely filled the car’s cargo bay.
Computer in Google self-driving Prius, 2010 (top) and Lexus, 2012 (bottom) Credit: Gordon Delos Santos
If you spend much time in the Bay Area you’ve shared roads with experimental self-driving cars dozens of times, perhaps without realizing.
By the late 2000s Google had moved beyond its core search business in several ambitious directions, from scanning the world’s books to smartphones. Founders Page and Brin especially liked to take on pivotal problems a few uncomfortable but exciting notches short of being solved, what they termed “moon shots.”

Google co-founds Larry Page and Sergey Brin, along with ex-CEO Eric Schmidt, show off one of Google's self-driving cars.
An early example had been Street View for Google Maps, co-developed by driverless Grand Challenge winner Sebastian Thrun. In 2008 he encouraged another self-driving veteran on his team, Anthony Levandowski, in a side project called the Pribot – a Prius modified for the stated goal of fetching pizza on its own.
The Pribot’s success helped convince Google’s founders that self-driving, too, might be a technology on the cusp. They assigned the Pribot [and its successors?] a series of challenges such as driving 100,000 miles on public roads, and even descending San Francisco’s twisty Lombard Street. It passed, and they made Thrun co-head of a new effort, Google X, geared to launching “moon shot” ventures.
Thrun recruited Levandowski and many of the other top researchers in the field, including Urban Challenge star Chris Urmson. The team began the hard work of transforming the raw capabilities demonstrated in desert Challenges into a consumer system; one polished enough to safely carry living passengers in the real world of traffic, and commuting, and family vacations.
Google’s system has guided a fleet of Prius and Lexus vehicles over half a million miles without causing any accidents, and the firm is a leading advocate for fully self-driving cars. But as to how it might deploy the technology, Google is keeping its options open.

Pribot, prototype pizza-delivery vehicle In 2008 the Pribot, a self-driving Prius, crossed the San Francisco Bay Bridge in a controlled street trial. The brainchild of driverless motorcycle pioneer Anthony Levandowski, it helped inspire Google’s self-driving car program. Credit: Anthony Levandowski
Credit: Google Inc.

Illustration by Harry Campbell for The New Yorker
If all of the billion or so cars in the world magically taught themselves to drive between now and tomorrow morning, what would actually change? Right away we’d have more free time, and mobility for those who can’t drive. But deeper changes would require new business models, laws, and ways of thinking about transportation; maybe even new infrastructure.
If our cars took their own wheels, we could text, tweet, and even play driving games as we lived the lifestyle only a few chauffeured executives can afford today. But beyond that, we would have to change the ways we think about driving and transport.

Rinspeed concept sketch. Credit: © 2014 Rinspeed AG
Would Americans and Germans, especially, be OK with giving up their century old driving cultures? Would we send the cars to pick up the pizza, or put our children in one to get to soccer practice? Would we comfortably share a driverless car with strangers? How would we manage the transition – when self-driving cars first mix with piloted ones?
Today’s wish list for self-driving has changed little since the 1930s. We want safety, speed, frictionless transport, no congestion, new balances of public spaces; perhaps even road trains and intelligent routing to augment or replace public transport.

Matternet Pilot #1 Co-axial Octocopter Drone, 2012 Startup MatterNet.us hopes to revolutionize small package transport with autonomous drones like this quadcopter prototype, which ferried medication to earthquake victims in Haiti. The copter carries up to five pounds. Credit: Matternet
But that doesn’t mean building out Bel Geddes’ Futurama. It’s worth remembering that much of that ‘30s dream would appear as a nightmare today. The cities cut through with multilevel highways; the giant roads eating up distance and landscape.
While we never got self-driving, we’ve lived out plenty of the ugly aspects of the Autobahn and Futurama visions, and our tastes have moved on. We want the benefits, yes, but in forms adapted for our time. Self-driving could be a transformational tool, and that makes it an essential one to use wisely. Perhaps it’s time to look ahead with a new Futurama.
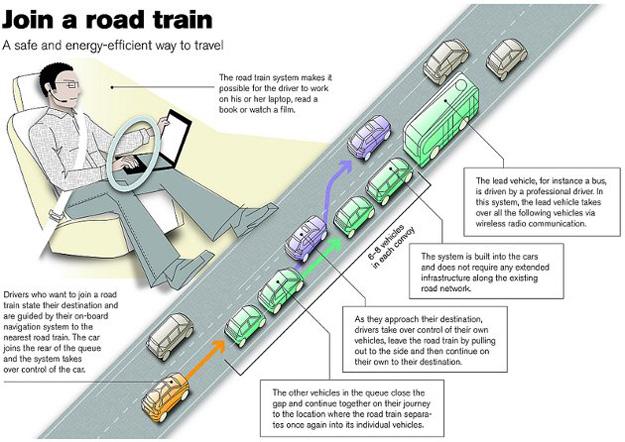
Road train/convoy. For many decades science fiction and futurists alike have portrayed the benefits of “platooning” cars together into tight virtual trains, saving both space and fuel since close following reduces wind resistance for the car behind. Credit: © SARTRE-Consortium

Passengers relax with electronics in this driverless concept mockup from Rinspeed. Current cars are already heavily computerized, and tech and car companies alike recognize the potential profits from freeing up drivers to spend more time online. Credit: © 2014 Rinspeed AG
If a self-driving car was waiting outside your door today, where would you go? On a pleasure tour of the countryside, or to your next chore? If you have some distance to travel, perhaps you’d like your car to join a high speed road train, a convoy that would save on gas and road space as it whisked you to your destination at over 100 mph.
How would you while away the minutes or hours as you drove? Maybe you’d watch a movie on a flat panel TV while sipping a cold drink, or surf the Web or chat on video, or stretch out for a luxurious nap. A few years from now, you might be able to order a lovely snack with voice commands and have it delivered piping hot by a drone that could match speed with your car to transfer your order.
You can use the comments section of this blog to add your thoughts.