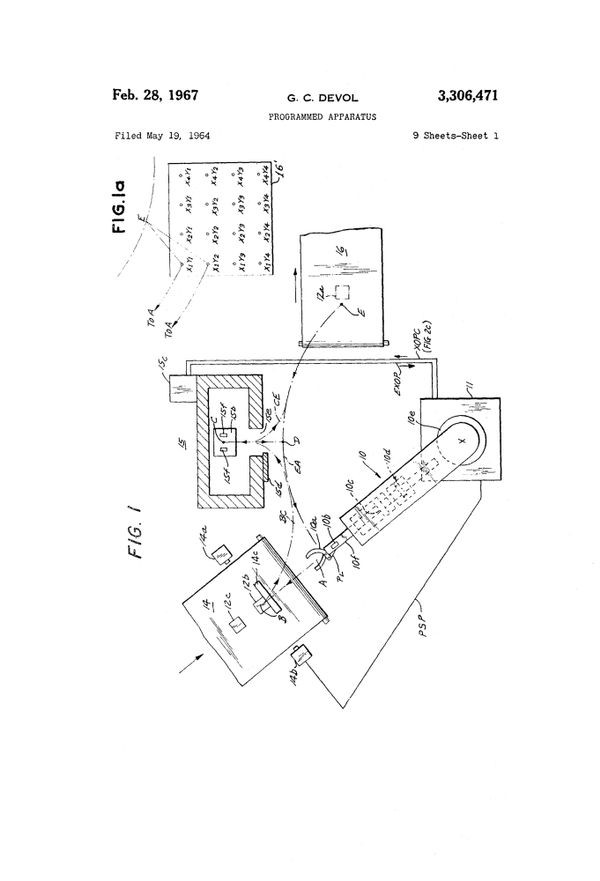
George Devol robot arm patent
Prev





































Next
- Details
- Description
- Date
- 1964-05-19
- Creator
- Devol, George
- Object ID
- 500004890
This patent, one of 40 issued to George Devol, focused on how robot arms were programmed to move. He combined both end-point specification and continuous control.