Title
Stanford Hydraulic ArmCatalog Number
102689927Type
Physical objectDescription
There is a sticker attached that reads "U.S. GOVT. PROPERTY". Object has an attached bag of loose parts.From Victor Scheinman email of 2/14/2011:
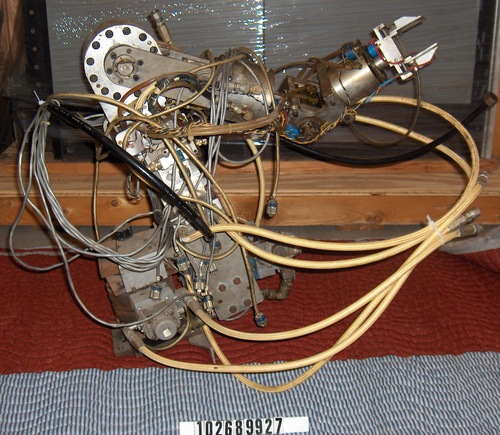
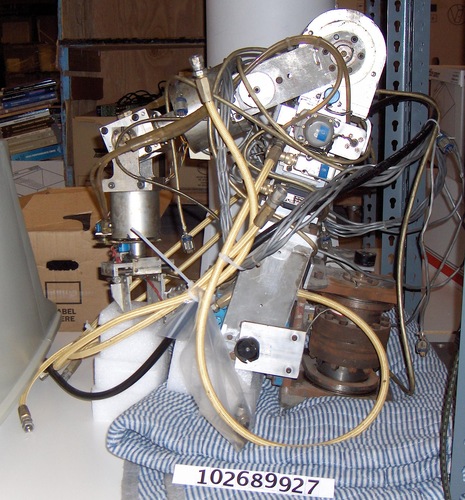
"[This robot] is a product of the Artificial Intelligence Project at Stanford University and was made entirely at Stanford in 1966-1968. I was one of the principal developers of this robot arm.
To Quote my Engineer's thesis (Mechanical Engineering, 1969) 'It was originally conceived of as an answer to the question 'Can a manipulator be made to move as fast as the computer can program and control it?'" Thus a fast manipulator was designed and developed.
It was a 6-degree of freedom hydraulic manipulator with a proportional end effector (7th degree of freedom). The arm was located in a glass-walled enclosure in the main computer room with the PDP-6 [computer that controlled it]. Fluid pressure was 2,000 psi. Unpowered, the arm dangled limply from its heavy steel stand... Due to the acceleration and power of the arm, the entire computer room shook when the arm ran. This required strengthening of the building floor with long heavy steel I-beams. Small leaks caused hydraulic fluid to drip onto the floor which was then tracked into the computer room causing a sticky mess. The arm was very strong and fast. Work tables were constructed of styrofoam which would crush during a crash, which was frequent. Active motion and joint control of the arm required the PDP-6 to run in what we called 'SPACEWAR Mode', which guarenteed continuous timeshare slices or even complete computer dedication for the duration of each move or task.
Most use of the arm was late at night where there were fewer other timeshare users to lock out. Coordinated trajectory and motion planning typically took 10+ times longer on the PDP-6 than on an actual fact motion arm. These issues and others made us realise that a hydraulic arm was not the ideal robot for the AI Lab environment. Thus I developed the [follow-on] Stanford Electric Arm which served the AI Lab for many years."
Date
1966-1968Manufacturer
Stanford Artificial Intelligence LaboratoryPlace Manufactured
U.S.Identifying Numbers
| Other number | 00538 | On a label on motor |
| Other number | ARPA SD-183 | On a label on motor |
| Serial number | 107-1337 |
Dimensions
overall: 25 in x 30 in x 22 inCategory
Robot
Related Records
| 102798046 | Stanford Hydraulic Arm (Unimate Mark II robot arm) |