Title
Salisbury robot handCatalog Number
102757101Type
Physical ObjectDescription
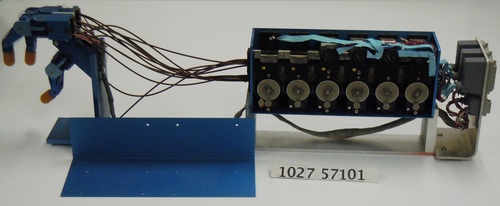
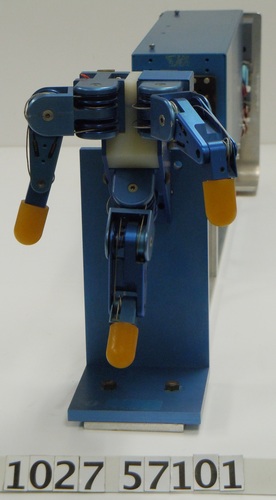
The object is a robotic hand that has three fingers with tan rubber tips.It is constructed from an aluminium plate base which has three assemblies mounted to it:
- the hand itself, which is connected via 12 sheathed steel cables to
- the motor/sensor box, which contains 6 motors, sensors, and geared cable assemblies, and
- a connector plate with 3 gray 56-pin female connectors and 3 gray 20-pin female connectors.
The three 56-pin connectors are wired to the motor/sensor assembly, while the three 20-pin connectors are wired directly to sensors on the hand.
The fingers each have three joints, two of which have parallel axiis at the end of the fingers for grasping, and a third joint closer to the base of the hand that allows the fingers to move at a 90 degree angle from the other two joints.There are four cables per finger, one pair for the two joints at the end of the finger, and two for the joints at the base of the finger.
Both the motor/sensor assembly and the hand are blue anodized aluminium.
There is a plate on the side of the motor/sensor assembly that says "Salsbury Robotics, Inc.", and that is also etched into the side of the hand assembly
Date
c. 1982Manufacturer
Salisbury Robotics Inc.Place Manufactured
Palo Alto, CADimensions
overall: 10 1/2 in x 34 1/2 in x 5 inCategory
RobotCredit
Gift of the National Institute of Standards and Technology (NIST)Lot Number
X8115.2017