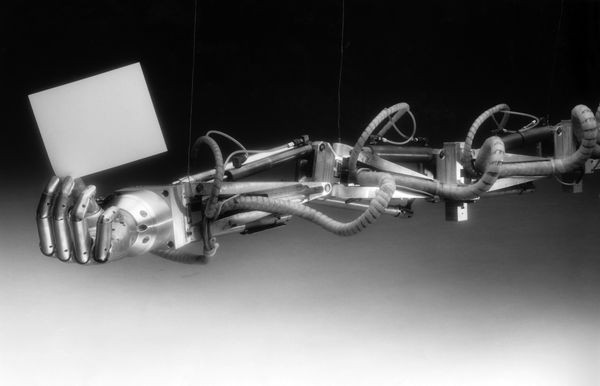
Minsky tentacle arm
Prev

Next
- Details
- Description
- Date
- 1968 ca.
- Copyright Owner
- © Massachusetts Institute of Technology (MIT)
- Keywords
- Robotics
- Object ID
- 102630906
This 12-jointed arm moved like an octopus and could reach around obstacles. It was powered by hydraulics and controlled by a DEC PDP-6.