Robot Research





Stanford Cart
The Stanford Cart was initially created to study driving a vehicle on the Moon remotely from Earth. In 1966, it was reconfigured at the Stanford Artificial Intelligence Laboratory to experiment with the idea of self-driving vehicles. Evolutionary results of this early work can be seen in the autonomous vehicles of today.
Robot Research
Universities have been hotbeds of robotic experimentation. Most built their own from scratch, exploring techniques for moving, planning, and understanding the environment from sensors.
Beginning with Denning Mobile Robotics in 1983, companies sold ready-made autonomous research robots. Denning failed in 1997, but others have taken its place with increasingly sophisticated products.

Marvin Minsky with a “Minsky Arm”
Minsky, co-founder of MIT’s AI Lab, did pioneering work in neural networks, knowledge representation, linguistics and robotics. This arm is one in a series of manipulators built at MIT.
View Artifact Detail
Shigeo Hirose with his robots
Professor Hirose’s research focuses on robots with animal-like movement: walking, crawling, swimming and slithering. He has also worked on designing robots to detonate abandoned landmines.
View Artifact Detail
Hans Moravec at Carnegie Melon University
Moravec, who used the Stanford Cart for his PhD thesis, worked in computer vision and robotics. He also wrote on the inevitability of super-intelligent robots.
View Artifact Detail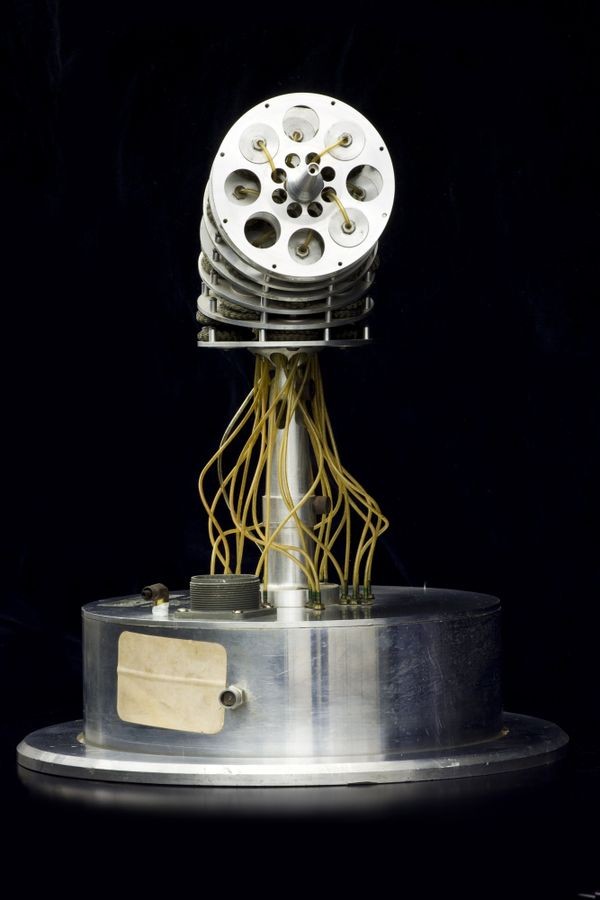
The Orm
Orm (Norwegian for "snake") was an unusual air-powered robot arm. It moved by inflating some of the 28 rubber sacks sandwiched between seven metal disks. The design was abandoned because movements could not be repeated accurately.
View Artifact Detail
Minsky tentacle arm
This 12-jointed arm moved like an octopus and could reach around obstacles. It was powered by hydraulics and controlled by a DEC PDP-6.
View Artifact Detail
ACMVI (Oblix) robot
The snake-like Oblix moved by rotating its angled joints. Designed by Professor Shigeo Hirose as both an arm and a tethered rover, Oblix was sold commercially for industrial applications as the MOGURA robot arm.
View Artifact Detail
SRI Centibots
The Centibots project, funded by the Defense Advanced Research Projects Agency (DARPA), sought to prove that up to 100 robots could work together in urban settings to sense their environment and provide surveillance.
View Artifact Detail
Rancho Arm
The Rancho Arm's six joints gave it flexibility similar to that of a human arm. Originally designed for the handicapped, it became one of the first arms to be controlled by computer when the project moved to Stanford in 1963.
View Artifact Detail