Shakey




Shakey
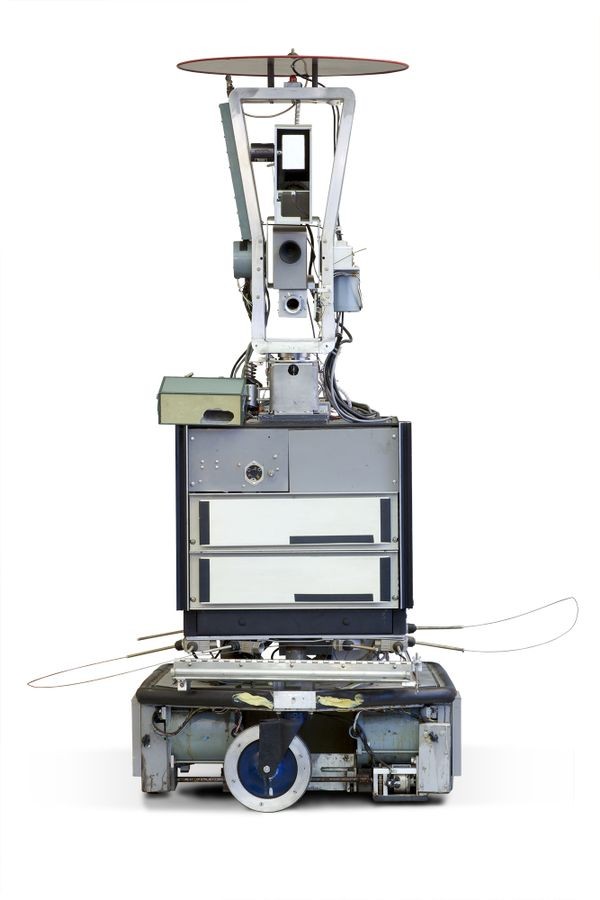
Shakey was a mobile robot with cameras and touch sensors, controlled by a large remote computer. It capitalized on progress in computer vision, language processing and planning to understand instructions (“push the block off the platform”) and direct its own actions.
Shakey
Robots require intelligence to understand sensory input, make plans, and take actions. That makes them ideal for testing many AI concepts.
Shakey, developed at the Stanford Research Institute (SRI) from 1966 to 1972, was the first mobile robot to reason about its actions. Shakey’s playground was a series of rooms with blocks and ramps. Although not a practical tool, it led to advances in AI techniques, including visual analysis, route finding, and object manipulation.

Components of Shakey
Shakey used the two-way radio link to communicate with the large computers that controlled it.
View Artifact Detail
Sven Wahlstrom and Nils Nilsson with Shakey
AI pioneer Nils Nilsson spent 23 years at SRI, making contributions to searching, planning, knowledge representation and robotics.
View Artifact DetailHow Did Shakey Find Its Way?
Shakey used search techniques to plan “way points” for navigating while avoiding obstacles.
Although the problems Shakey faced were simple and only required basic searches, the researchers developed a sophisticated software search algorithm called “A*” that would also work for more complex environments. Today A* is used in applications such as understanding written text, figuring out driving directions, and playing computer games.
A planning system called STRIPS (“Stanford Research Institute Problem Solver”) reasoned about complicated goals, like “go to room D and push block 9 over to where doorway 4 is.”

Early Shakey design drawing
Neural-network and physics researcher Charles Rosen initially proposed developing a mobile automaton in 1963. The retractable manipulator arms shown here were never built.
View Artifact Detail
Tom Garvey and Helen Chan operate Shakey
The computers on the right processed the transmitted video and sensor information, then sent motion commands back to Shakey.
View Artifact Detail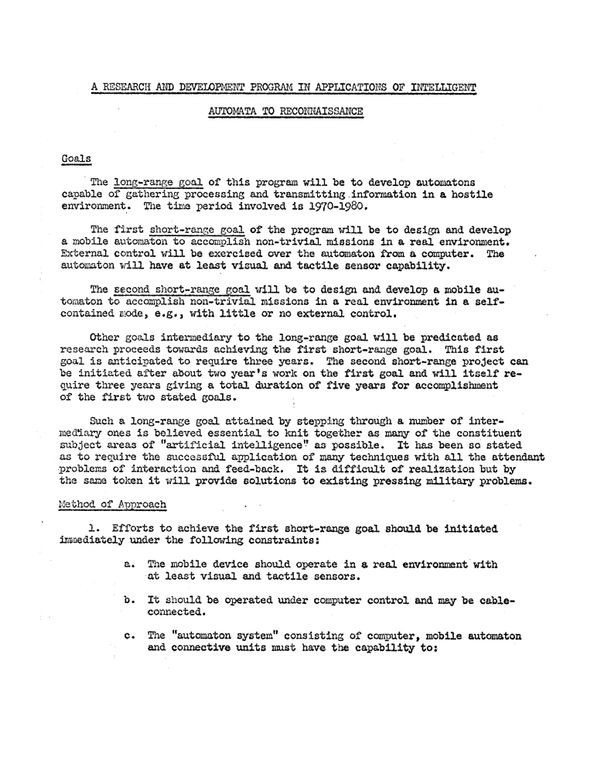
Original Shakey proposal
Like many advances in computing, Shakey was funded by the U.S. Defense Department to provide technology for the military.
View Artifact DetailWhy Was It Named “Shakey”?
Charles Rosen, head of the SRI AI group, recalled: “We worked for a month trying to find a good name for it, ranging from Greek names to whatnot, and then one of us said, ‘Hey, it shakes like hell and moves around, let’s just call it Shakey.’”

Charles Rosen with Shakey
Rosen led the team that developed Shakey from 1966 to 1972. He and three other Stanford Research Institute (SRI) colleagues also collaborated as owners of Silicon Valley’s Ridge Vineyards.
View Artifact Detail
Shakey team
Most of the Shakey team reunited one last time just before the robot was donated to The Computer Museum in Boston in 1983.
Back (L-R): Charles Rosen, Bertram Raphael, Dick Duda, Milt Adams, Gerald Gleason, Peter Hart, Jim Baer
Front (L-R): Richard Fikes, Helen (Chan) Wolf, Ted Brain