Putting Robots to Work
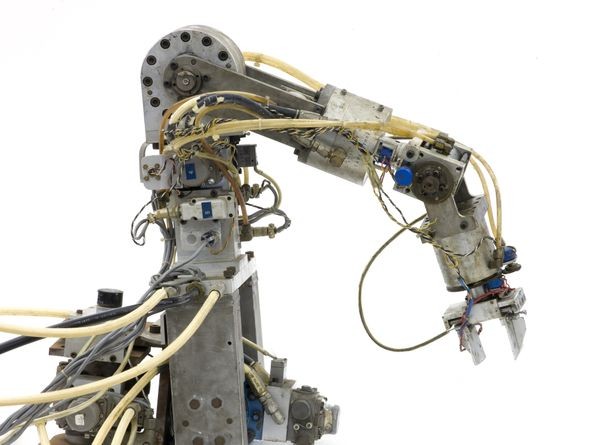







Stanford Hydraulic Arm
This robot is a product of the Artificial Intelligence Project at Stanford University between 1966-68. It was developed by Victor Scheinman and others as a way to test whether a robot manipulator could keep up with the computer controlling it.
Putting Robots to Work
In factories, robots don’t have to look human—they just need to do the work.
As “multipurpose programmable object manipulators,” robots weld, paint, assemble parts, package finished goods, and test for correct operation.
Computer-controlled industrial robots appeared less than a decade after the first computers. George Devol founded Unimation in 1956, making mechanical arms based on hydraulic actuators that eventually were accurate to .0001”. Unimation licensed its technology to Kawasaki in Japan. American companies entered the field in the 1970s, but few survived. Today, most industrial robots are made in Japan.

Unimate at General Electric
General Motors used the Unimate 1 in 1961 to move hot die castings and weld parts onto auto bodies. Success in those tasks stimulated other uses.
View Artifact Detail
iRiM50 robot
This robotic arm used sensors and cameras to do repetitive and complicated industrial tasks. But the company found sales sluggish, and refocused on AI-based visual inspection systems. Once a high-flier, Robomation closed in 1990.
View Artifact Detail
Sentry robot
Boston-based Denning designed this robot as a security guard patrolling for up to 14 hours at 3 mph. It radioed an alert about anything unusual in a 150-foot radius. The product, and the company, did not succeed.
View Artifact Detail
MH-1 mechanical hand
Heinrich Ernst designed this mechanical hand for his PhD thesis at MIT under Claude Shannon. It was controlled by TX-0, an early transistorized computer.
View Artifact Detail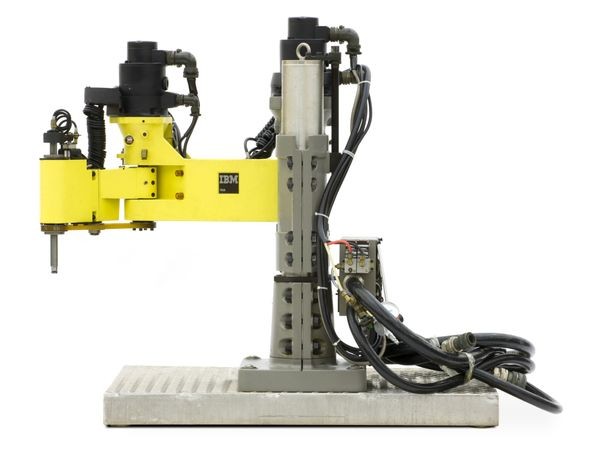
IBM 7535 manufacturing system
Based on a Japanese robot, IBM’s 7535 was controlled by an IBM PC and programmed in IBM’s AML (“A Manufacturing Language”). It could manipulate objects being manufactured weighing up to 13 pounds.
View Artifact Detail
Mars Rover patent drawing
This CalTech design patent was for the Opportunity and Spirit Mars Rovers. Both landed in 2004 and ran 20 times longer than their planned 90 days.
View Artifact DetailRelated Content
Ballet Robotique
Watch the classic film on industrial robots by General Motors, Ballet Robotique.