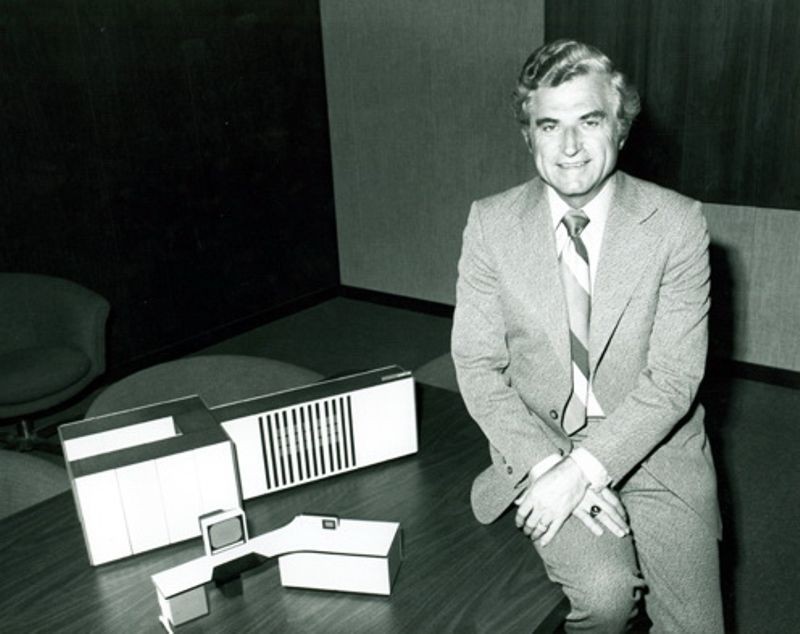
Gene Amdahl with 470V/6 model
Gene Amdahl, father of the IBM System/360, starts his own company, Amdahl Corporation, to compete with IBM in mainframe computer systems. The 470V/6 was the company’s first product and ran the same software as IBM System/370 computers but cost less and was smaller and faster.

Tillie the Teller, Wells Fargo Bank
The ERMA system had revolutionized behind-the-scenes check processing in the 1950s, spawning the funny letters still at the bottom of checks today. During the 1960s researchers in various countries have been working on bringing automation – and online transactions – to customers in the form of an Automated Teller Machine (ATM). Barclay’s Bank in the UK has likely been the first to put one in operation, in 1967. By decade’s end many systems are up or being planned in Europe and North America. The paper used by some of the first ATMs is slightly radioactive, to be machine readable. The 1970s will also see rapid growth in behind-the-scenes financial transaction networks, like SWIFT for wire transfers.
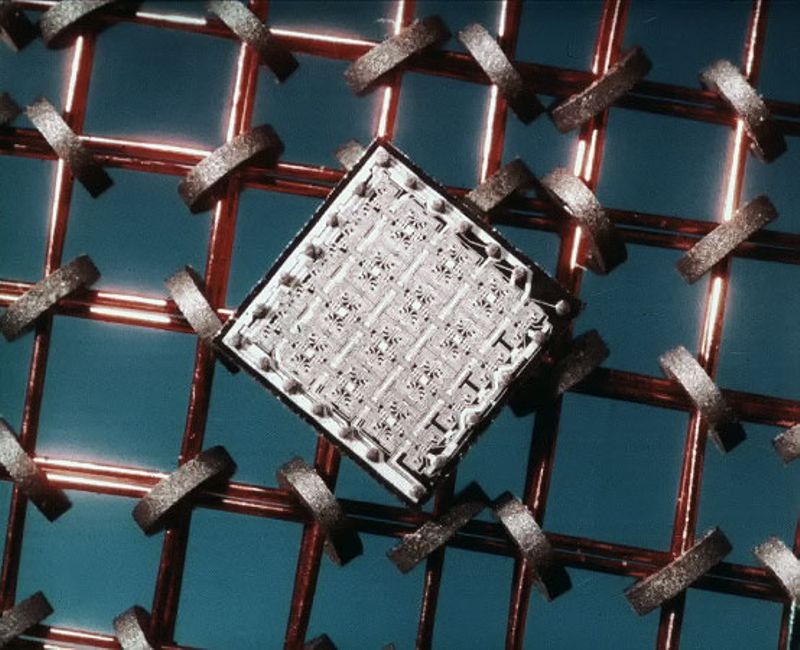
IC memory on top of core
In a departure from using magnetic core memory technology, IBM introduces the System 370 Model 145 mainframe computer, the company's first all-semiconductor memory computer. The Model 145 could store an equivalent amount of data in half the space, compared to a computer using core memory.

Niklaus Wirth
The Pascal programming language, named after Blaise Pascal, a French physicist, mathematician and inventor turned philosopher, is introduced by Professor Niklaus Wirth. His aim with Pascal was to develop a programming language applicable to both commercial and scientific applications, and which could also be used to teach programming techniques to college students. It was closely based on ALGOL 60, which Wirth had also helped to develop.

SRI’s Shakey
SRI International´s Shakey robot becomes the first mobile robot controlled by artificial intelligence. Equipped with sensing devices and driven by a problem-solving program called STRIPS, the robot found its way around the halls of SRI by applying information about its environment to a route. Shakey used a TV camera, laser range finder, and bump sensors to collect data, which it then transmitted to a DEC PDP-10 and PDP-15. The computer sent commands to Shakey over a radio link. Shakey could move at a speed of 2 meters per hour.